物流現場では、AGVへの期待は大きいが、色々な課題がある。
その課題の1つであるAGV設計の自由度をドライバ内蔵モータで向上する。

物流現場では人手不足と搬送効率の向上のために、AGVの導入が進んでいる。
より柔軟で省スペースな設計が求められる中、ドライバ内蔵モータへの注目が高まっている。
AGVは制御基板や配線が複雑で、設計・保守に時間を要している。
また、筐体サイズの制約から高密度な機器配置が困難で、柔軟なレイアウト変更にも限界があった。
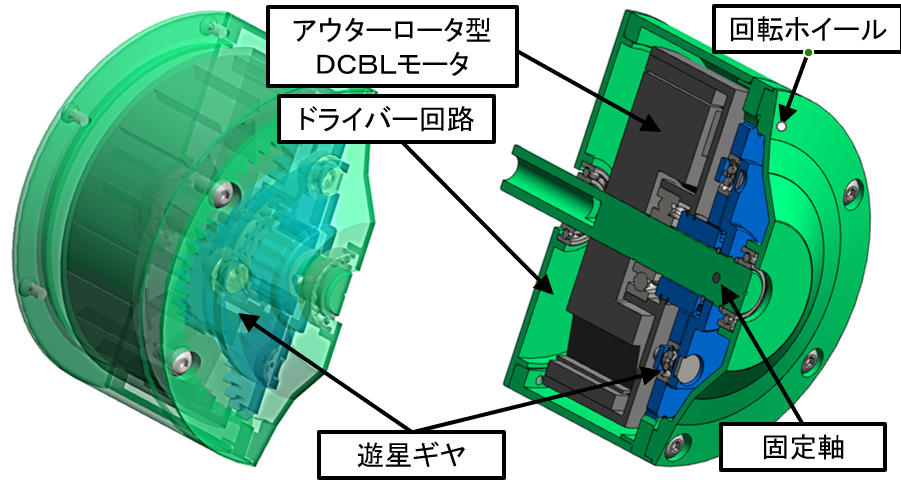
ドライバ内蔵モータにより、制御盤の小型化と配線の簡素化を実現した。
AGVの筐体設計の自由度が向上し、設置スペースの最適化と保守性の向上、さらには搬送精度の安定化にも貢献した。

複数台のAGVを連携させた群制御や、AIによる搬送ルート最適化との統合への対応をする。