インホイールモータをプーリに内蔵することで伝達ロスを低減し駆動効率を向上するだけでなく、制御性の向上も可能である
産業機械や搬送装置で省スペース化が進む中、外部駆動機構を削減する直結型システムが求められていた。
また、駆動系を直結型とすることで制御・応答性能の向上への期待もされている。
従来システムは駆動系のサイズが大きく、駆動部、ベルト部のスペースやメンテナンス性に問題があり、装置全体の小型化と効率向上が難しかった。
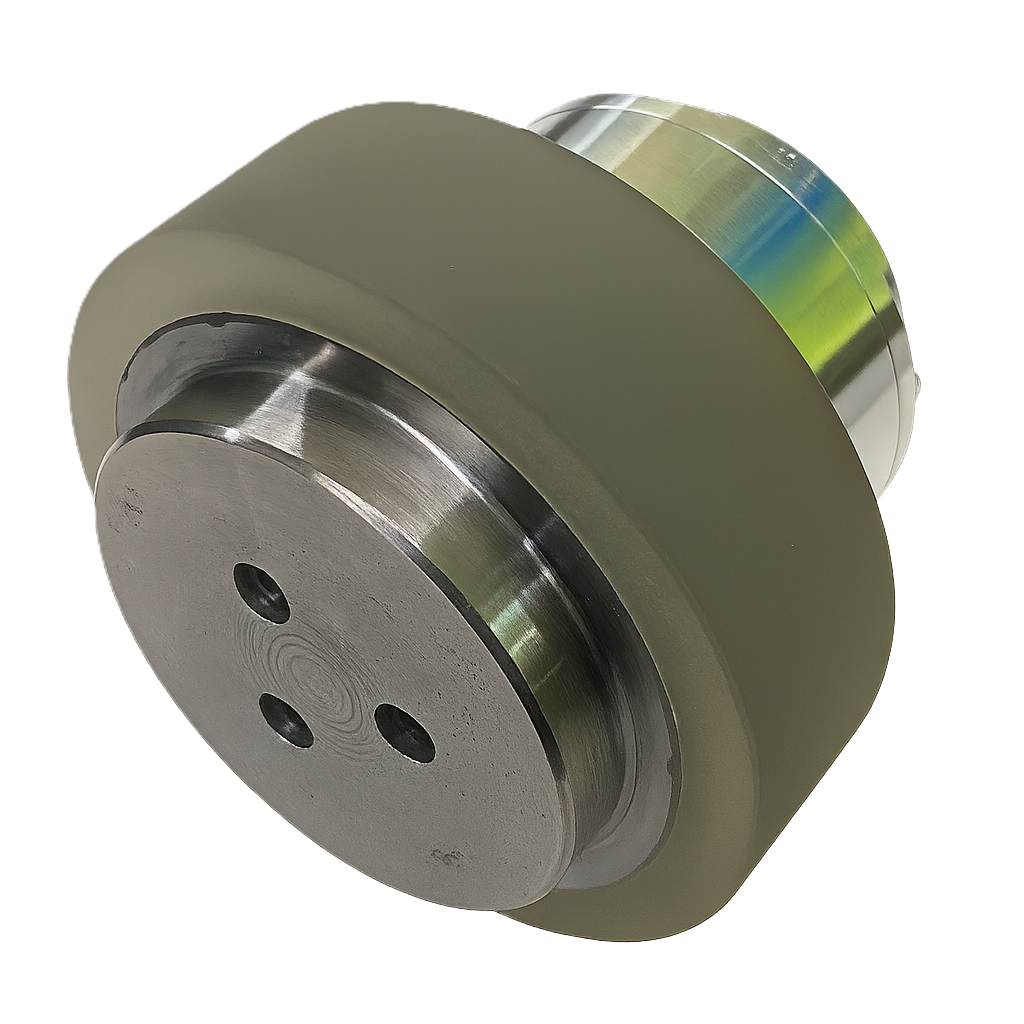
アウターロータのラジアルギャップ型モータをプーリ内に組込むことでサイズを小型化を実現。
ベルトなどを削減することができ、伝達ロスの低減が可能となるとともに、制御応答性も向上することができた。

モータ制御とセンサ連携を強化し、AGVやロボット搬送装置などへの応用拡大を図る予定である。