遊星減速機、通電時解放ブレーキを内蔵しながら薄型で高トルクのモータの開発が必要である。
※AMR:Autonomous Mobile Robot(自律走行搬送ロボット)


低速回転・高トルクを実現するためには遊星減速機が不可欠であり、さらに坂道停車時の安全性確保には通電時解放ブレーキの搭載が求められる。
これらの機構によりモータに割り当てられるスペースが限られるため、非常に薄型で高トルクのモータが必要となる。
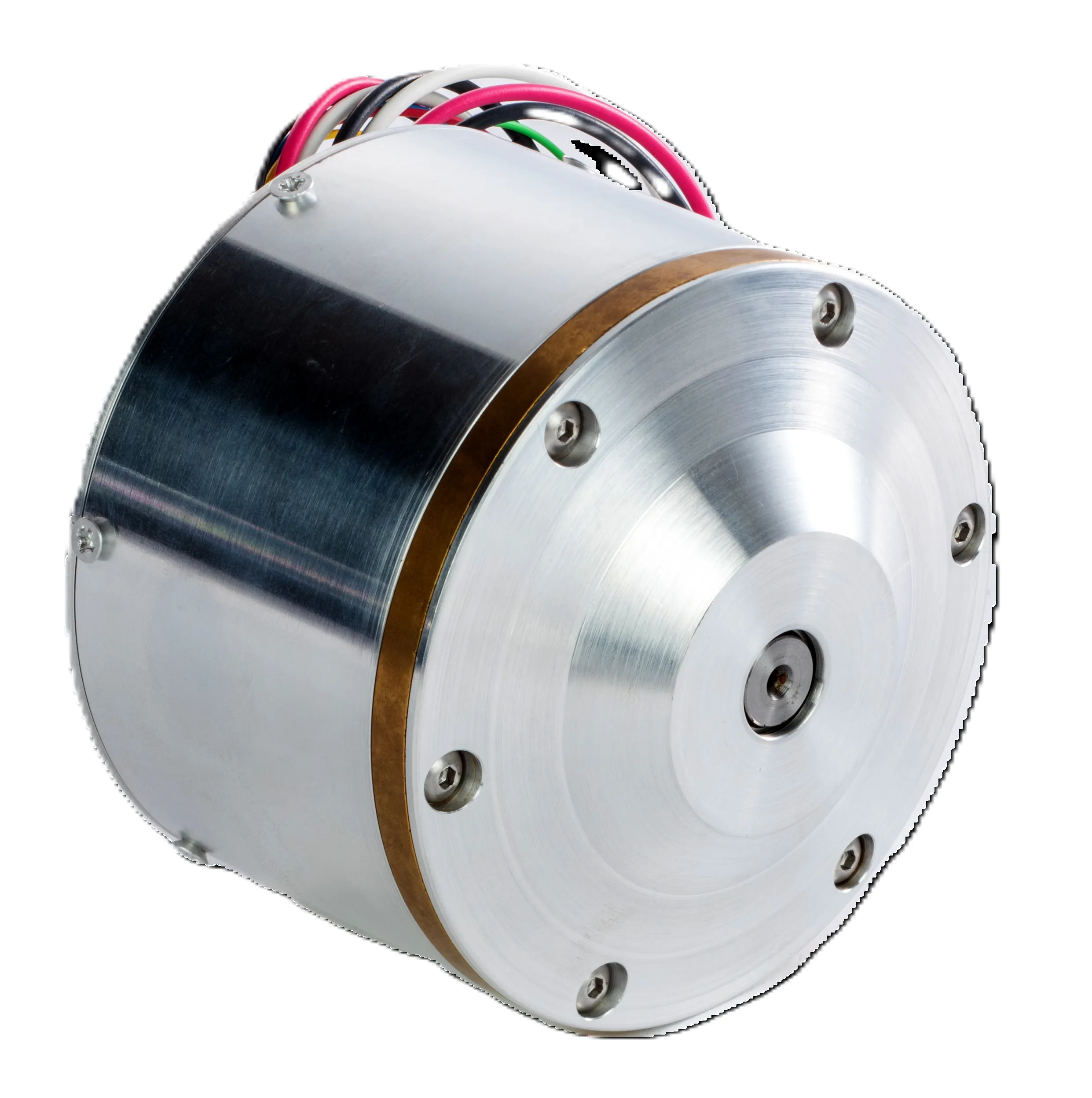
限られたスペースの中で、200kgの荷重を支えながら坂道での確実な停車を可能にするための通電時解放ブレーキと、高トルクを実現する遊星減速機を内蔵して駆動性能と安全性を両立する。

圧粉コアを用いたシングルギャップ・アキシャルモータの採用により、モータとしての特性を維持しつつ、全長をコンパクト化する。
これにより、遊星減速機およびブレーキの搭載スペースを確保することができた。

世の中には人が引っ張る/押すことで動かしている台車などが多くある。
これを簡単に電動低速車両として今まで人力で動かしていたものをサポートする。